机械原理
(未完成……敬请期待……)
1
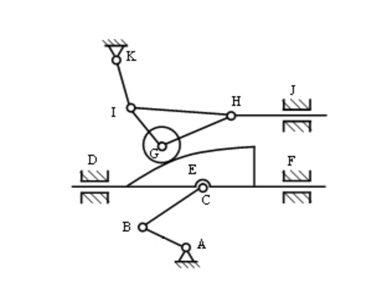
8个活动构件,I、H复合铰,
1
GD是虚约束,n=6,F点是复合铰,B点是局部自由度,
1
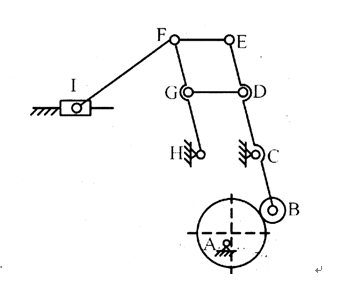
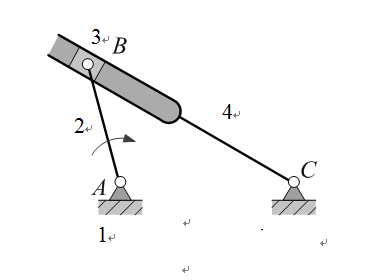
如图所示的平面机构,构件2以角速度 做匀速转动,转动方向为顺时针,试用速度瞬心法求在图示位置时构件4角速度 的大小和方向。

1
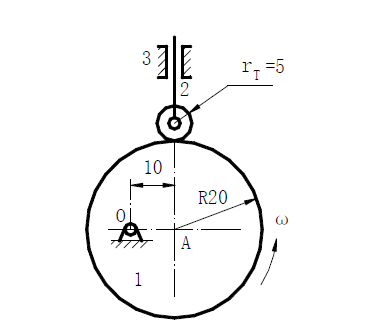
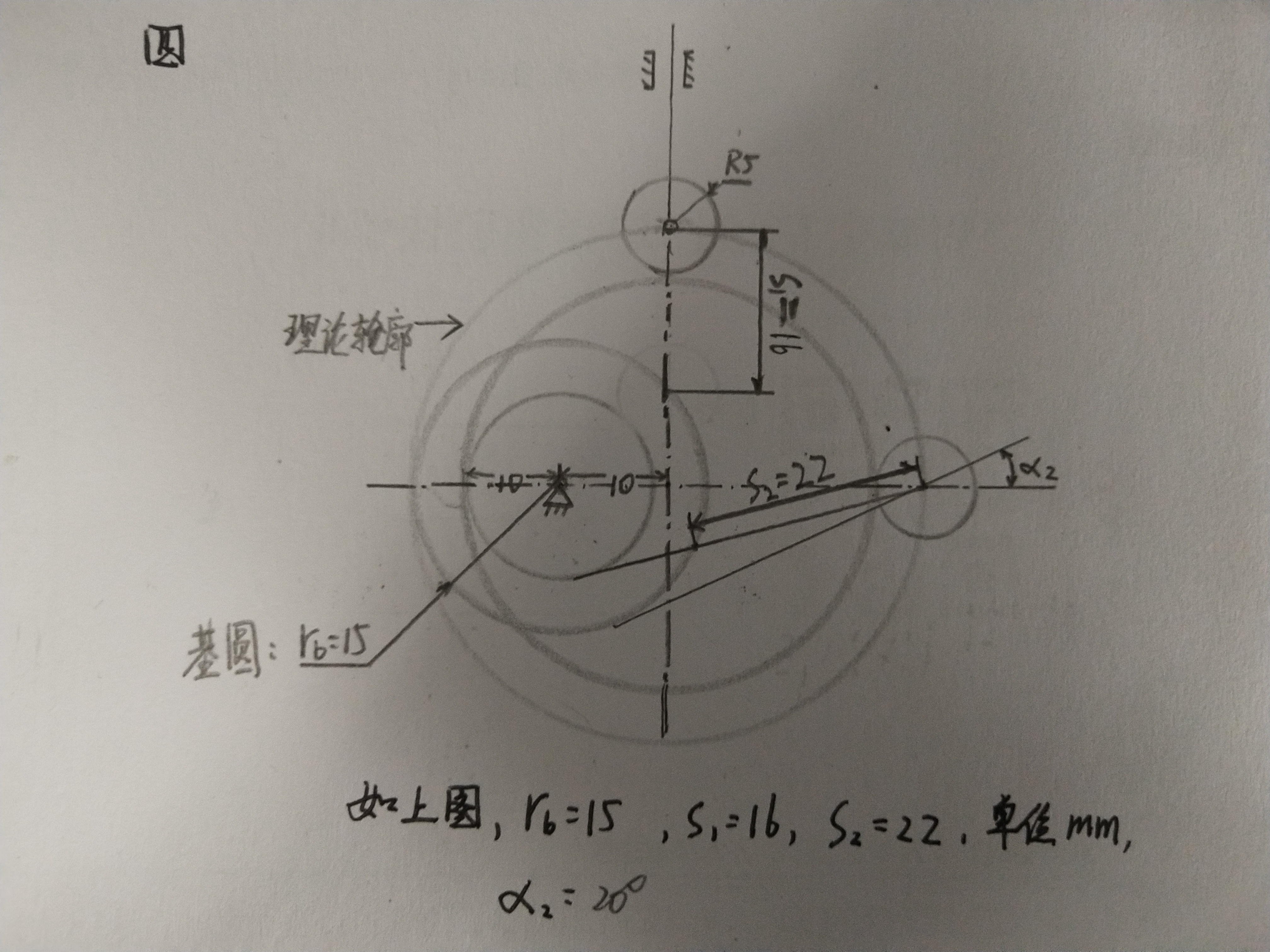
一偏心圆。试用作图法在图上画出:(1)凸轮理论轮廓线和基圆,并确定基圆半径大小;(2)图示位置从动件的位移 ;(3)凸轮由图示位置转过90°时的位移 ,和压力角
1
已知一对标准安装的外啮合标准直齿圆柱齿轮的参数为 , ,,,(1)求两齿轮的中心距、齿厚和齿距;(2)分别求两个齿轮的分度圆直径、基圆直径、齿顶圆直径、齿顶圆压力角;(3)当这对齿轮中心距增大 后,其传动比 和啮合角 分别是多少?
1
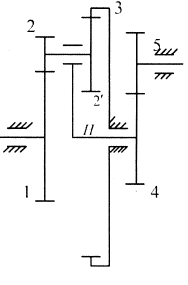
如图所示轮系中,已知各轮齿数为: , , , , , ,试求传动比